Современная техника зачастую слишком сложна в освоении. Особенно трудно сладить с ней тем людям, которые и в быту не могут обходиться без посторонней помощи. Одно неловкое движение, и чувствительные механизмы дают сбой. Вместо заботы они наносят травму или просто ломаются.
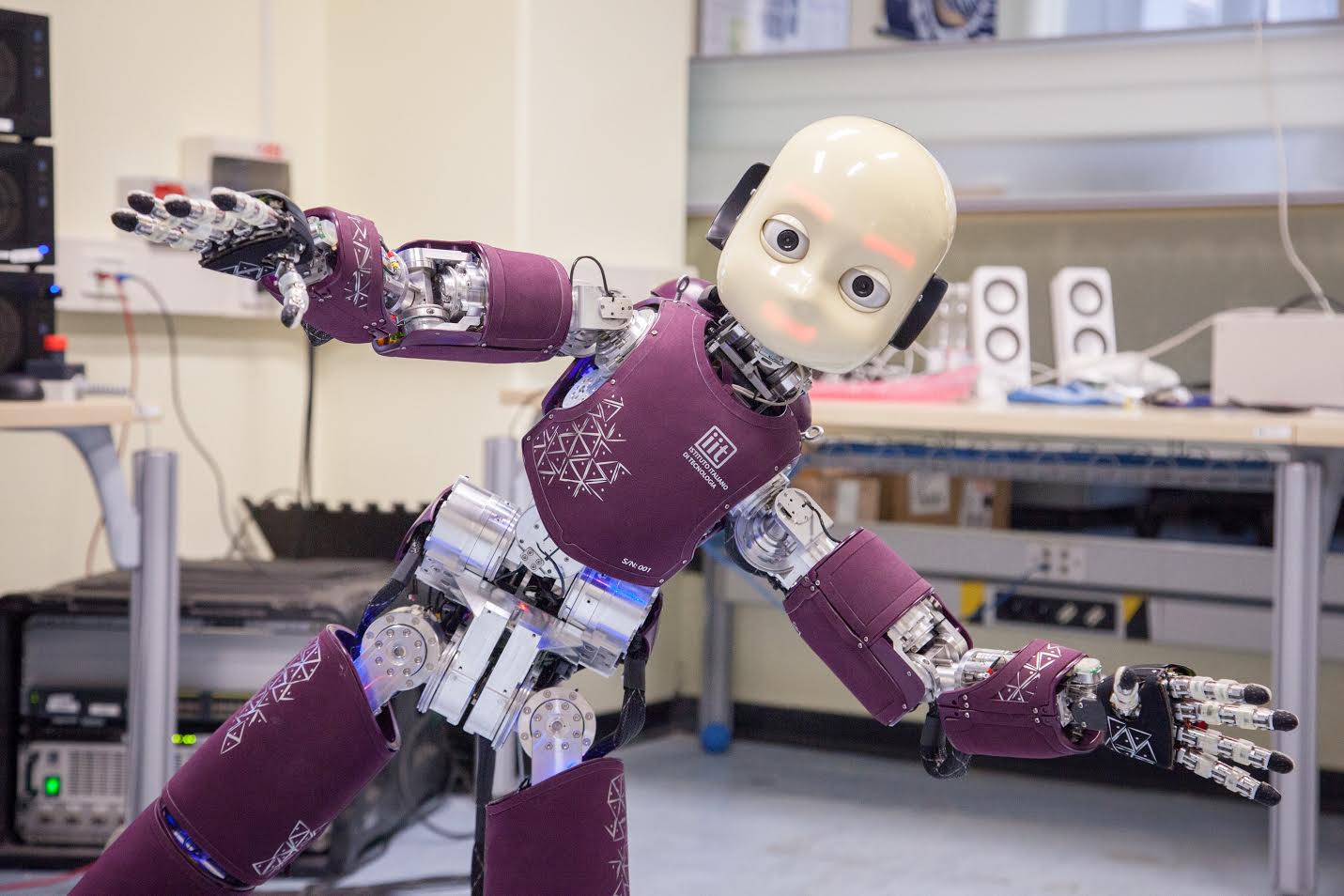
Решить эту проблему пытаются на уровне человеко-машинных взаимодействий. Для этого даже придуман специальный термин pHRI – поле физического взаимодействия между человеком и роботом. Это зона возможного контакта, где движущиеся части робота представляют потенциальную угрозу для находящихся поблизости людей.
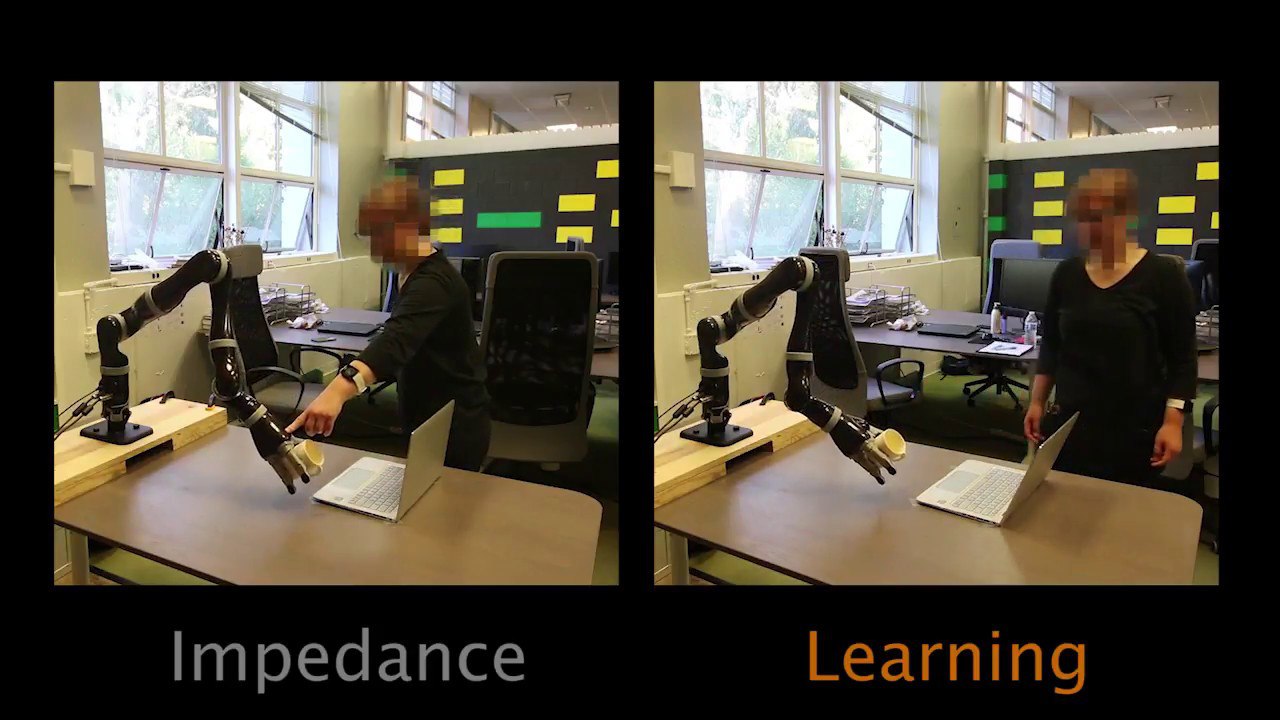
Долгое время основной безопасности pHRI были разные ограничения. Например, в случае опасного сближения робот прекращал двигаться, а после толчка старался вернуться на прежнюю траекторию. Сейчас ключевая роль отводится алгоритмам обучения, а вместо простой остановки или возврата к заложенным шаблонам действий робот учится реагировать на движения людей.
Демонстрация возможностей pHRI https://youtu.be/I2YHT3giwcY
Подробнее https://goo.gl/xdZADc