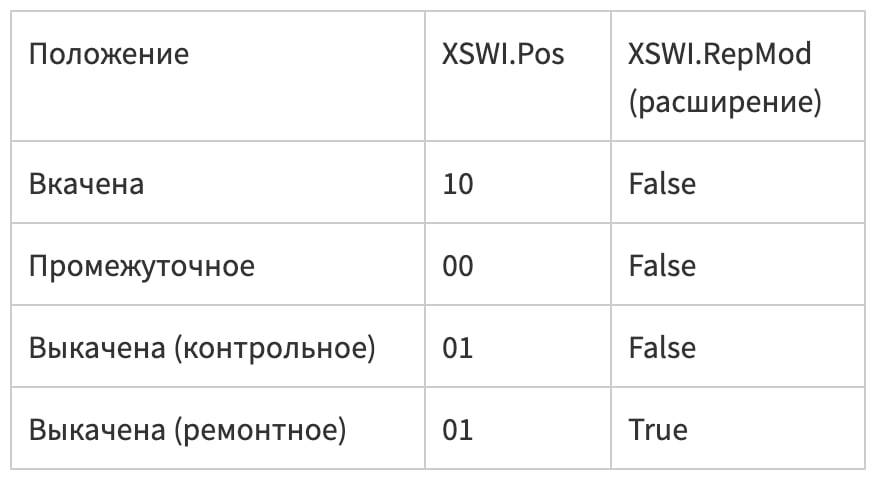
Моторизированное управление телегой это сейчас вроде уже мэйнстрим: много проектов с таким. Вопрос, как я его понял, про состояние, когда телега выкачена совсем. То есть она не в контрольном положении находится. Очевидно, что когда она стоит в другом углу КРУ, её уже мотором не вкатить, поэтому TestPos может быть только статусом. А вот Pos, который принимает 3 положения:
10 - вкачена
00 - промежуточное
01 - выкачена (контрольное)
— это управляемый (DPC) объект