K
EXTI тоже отличный вариант
Да он у меня уже работает, в принципе так, как вы и описали, по таблице состояний.
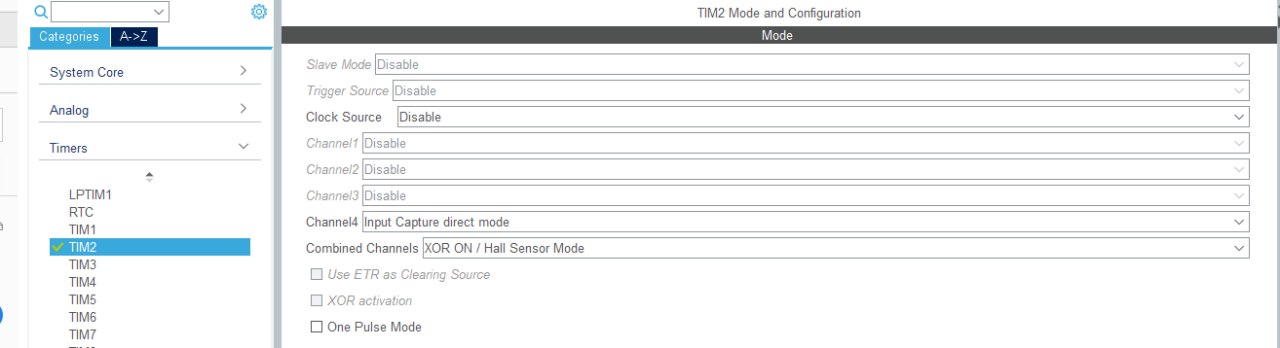
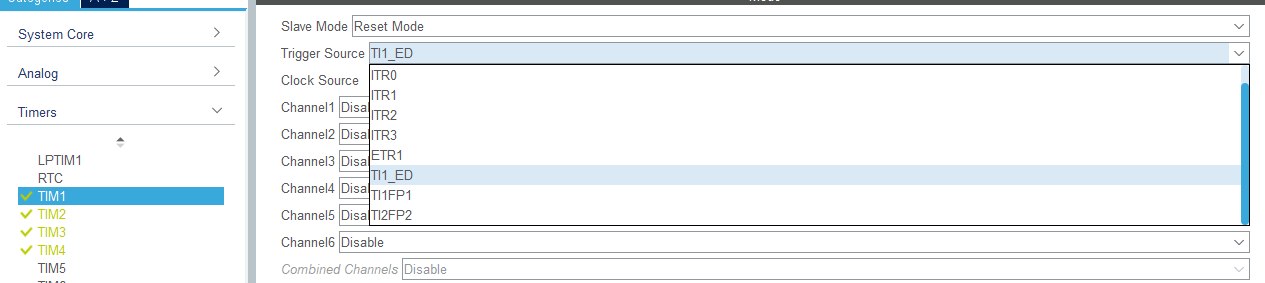
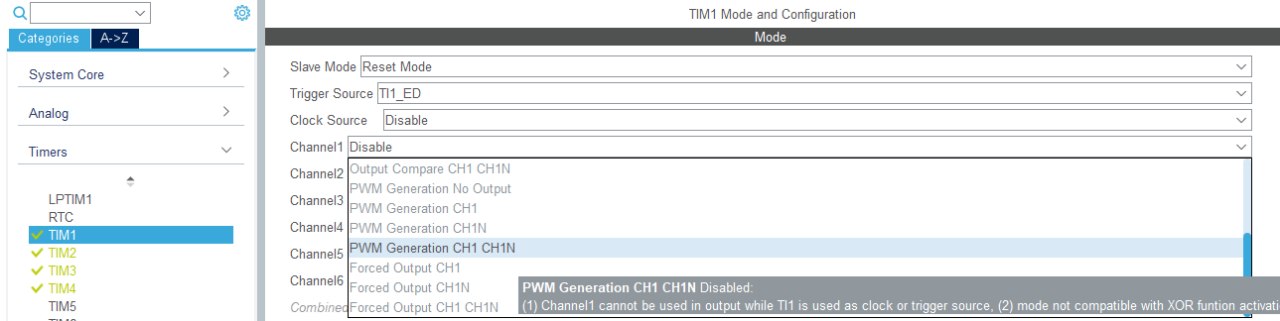
Просто я прочитал в даташите, что есть аппаратная реализация и так сказатб для самообразования решил накидать проект в кубе, но никак не могу понять как сконфигурировать ноги, он вечно на что то ругается.
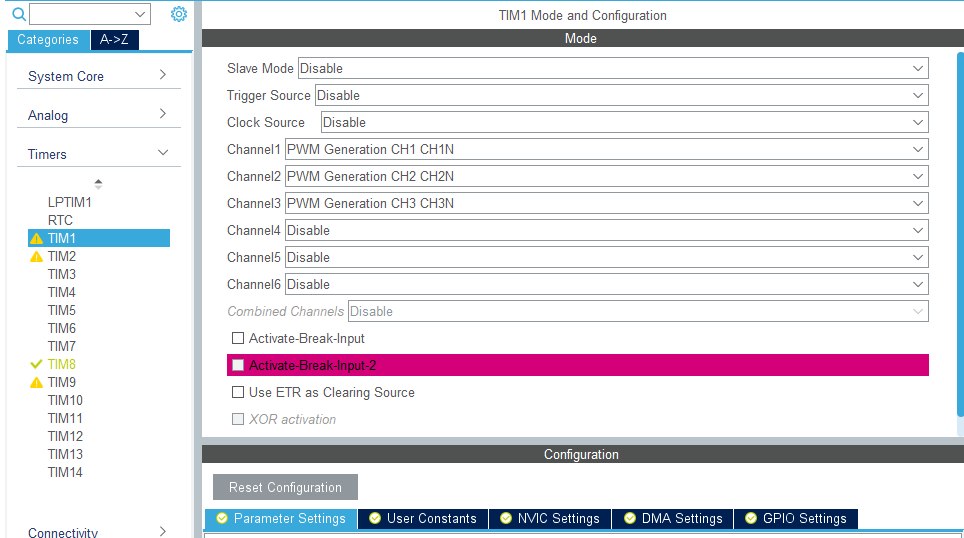
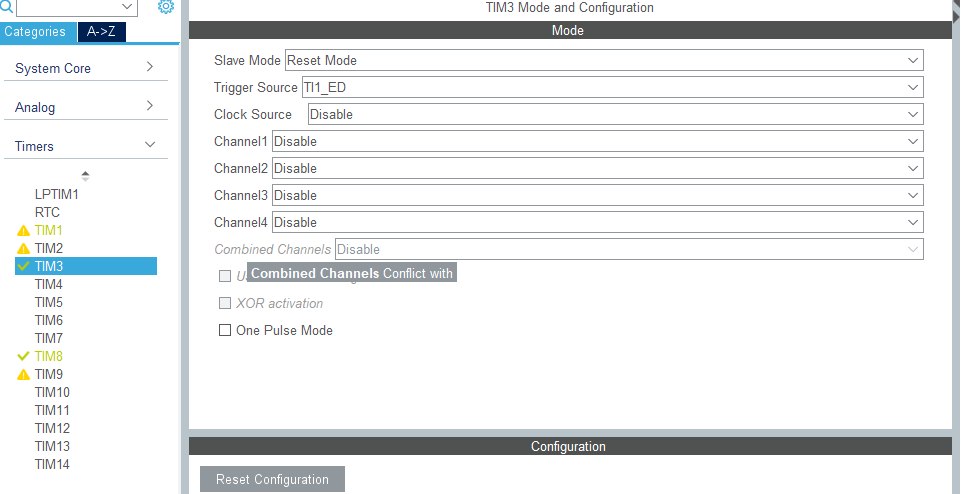
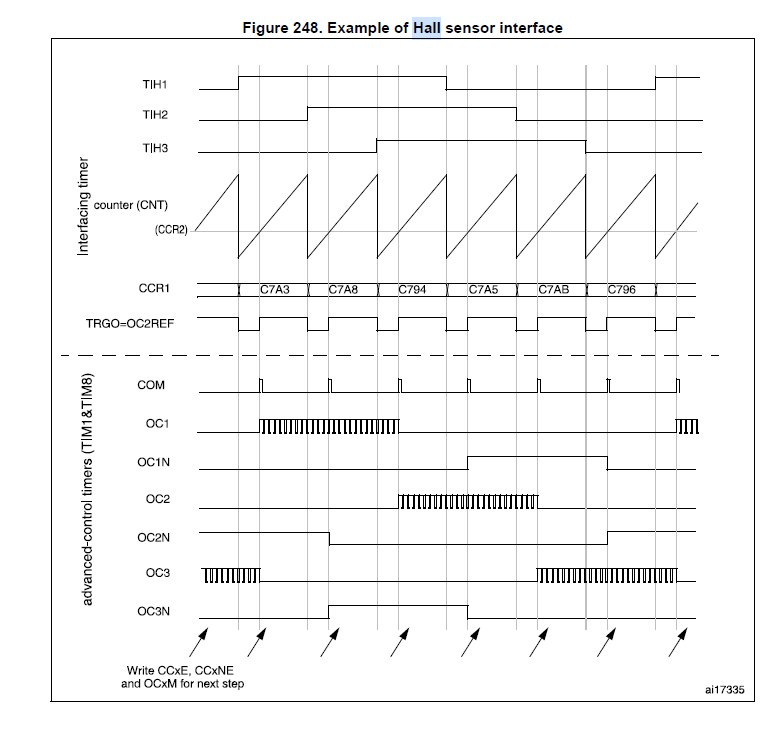
Судя по описанию (тот скриншот который я прикрепил выше), TIM1 использует комплиментарный шим для управления мотором, но является slave по отношению к таймерам захвата сигнала с холл-сенсоров, которые триггерят его к переключению плеч.
Просто я прочитал в даташите, что есть аппаратная реализация и так сказатб для самообразования решил накидать проект в кубе, но никак не могу понять как сконфигурировать ноги, он вечно на что то ругается.
Судя по описанию (тот скриншот который я прикрепил выше), TIM1 использует комплиментарный шим для управления мотором, но является slave по отношению к таймерам захвата сигнала с холл-сенсоров, которые триггерят его к переключению плеч.