



a
Size: a a a
2020 October 21
U
а на какой частоте fmc сидит?
я не помню, в коде вроде инит есть
U
а на какой частоте fmc сидит?
проц stm32f205 был, 120 MHz
VK
Народ, вопросец.
Я правильно понимаю, что на Raspberry Compute Module 4 нельзя навесить Raspberry Pi High Quality Camera?
Я правильно понимаю, что на Raspberry Compute Module 4 нельзя навесить Raspberry Pi High Quality Camera?
VK
Народ, вопросец.
Я правильно понимаю, что на Raspberry Compute Module 4 нельзя навесить Raspberry Pi High Quality Camera?
Я правильно понимаю, что на Raspberry Compute Module 4 нельзя навесить Raspberry Pi High Quality Camera?
А там CSI не прокинут?
VK
А там CSI не прокинут?
Да, ты прав, увидел 4 lane mipi CSI
2020 October 22
IF
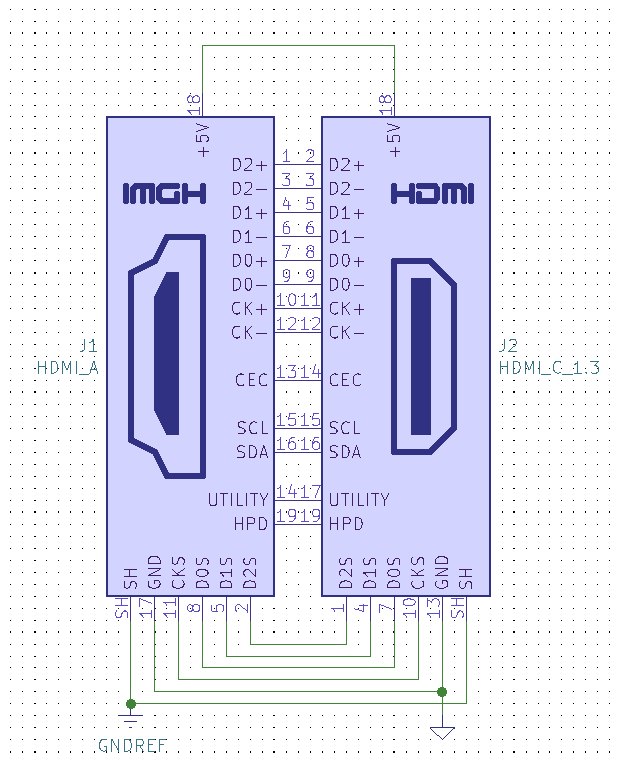
посоны, делаю переходник HDMI-HDMI mini (папа папа), я все пральна сделал? Не надо ничего перекрещивать?
A
Для удлиннения?
A
Есть ощущение что надо, но это не точно
IF
Для удлиннения?
для технологичного соединения готовых модулей на маленьком расстояни)
IF
ладно буду копать стандарты
R
посоны, делаю переходник HDMI-HDMI mini (папа папа), я все пральна сделал? Не надо ничего перекрещивать?
Не надо перекрещивать. Разность распиновка разъемов ты учёл так что все должно работать
K
Здравствуйте товарищи! Помогите пожалуйста разобраться, как правильно сконфигурировать ноги у STM32 для работы с BLDC и холл-сенсорами?
K
Сейчас у меня сигналы с холл сенсоров идут просто в GPIO_EXTI, хочу понять как сконфигурировать в кубе так, что бы шим сигнал аппаратно включался от сигнала холл сенсора.
K
камень stm32F7
И
Здравствуйте товарищи! Помогите пожалуйста разобраться, как правильно сконфигурировать ноги у STM32 для работы с BLDC и холл-сенсорами?
@lysergicenemy подскажи человеку)
E
Здравствуйте товарищи! Помогите пожалуйста разобраться, как правильно сконфигурировать ноги у STM32 для работы с BLDC и холл-сенсорами?
таймер в режиме захвата у stD же есть статья, как это делать через куб
K
Evgen
таймер в режиме захвата у stD же есть статья, как это делать через куб
Что или кто такое stD ? :)
L🗿
Здравствуйте товарищи! Помогите пожалуйста разобраться, как правильно сконфигурировать ноги у STM32 для работы с BLDC и холл-сенсорами?
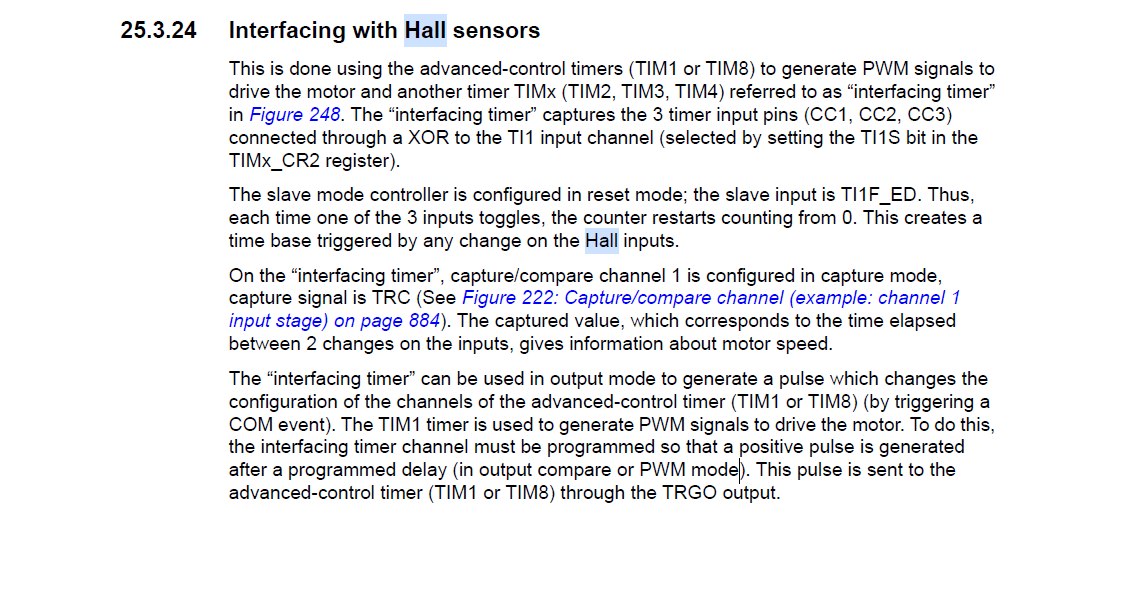
Там есть специальный режим, в кубе он вроде XOR input называется, для него используются только 1,2,3 канал таймера. Второй таймер, генерирующий ШИМ, конфигурироваться в режим 6 шаговой коммутации для BLDC.
Только заморачиваться и делать это все аппаратно большого смысла не имеет т.к. эти операции требуют минимум процессорного времени
Вообще я делал просто, читал состояние ног в прерывании 40кГц и делал переход по таблице, для средних скоростей вполне рабочий вариант
Только заморачиваться и делать это все аппаратно большого смысла не имеет т.к. эти операции требуют минимум процессорного времени
Вообще я делал просто, читал состояние ног в прерывании 40кГц и делал переход по таблице, для средних скоростей вполне рабочий вариант
L🗿
Сейчас у меня сигналы с холл сенсоров идут просто в GPIO_EXTI, хочу понять как сконфигурировать в кубе так, что бы шим сигнал аппаратно включался от сигнала холл сенсора.
EXTI тоже отличный вариант