D
Valery
Да, проц жив. Все грузится и моргает. Да и вафля работает, но только чувствительность приемника и мощность передатчика вообще никакие. При сканировании из штук 15 AP (соседских) видит не больше двух. Подключиться не может даже к рядом лежащему телефону. Впечатление, что оторвана антенна, но повреждений на плате нет
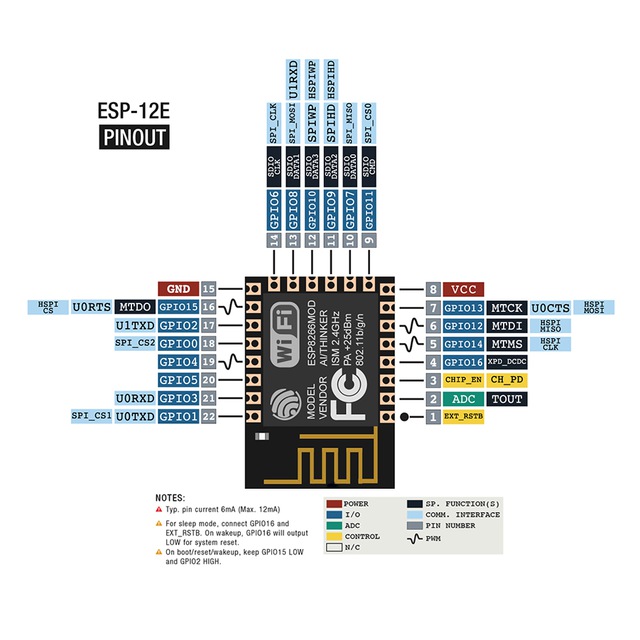
Может не запаян или отвалился резистор соединяющий антенну с есп