Друзья, всем добрый вечер!
Завтра, как и обычно, будет два доклада. Оба в той или иной степени будут касаться байсовских сетей и обещают быть весьма любопытными.
Сначала
@cydoroga расскажет про logistic MDP – недавнее поделие рук google research и принятое на конференцию IJCAI-17. Речь пойдет про long-term decision process и user interaction. В двух словах – мы узнаем, как не ограничиваться предсказанием статического пользовательского поведения с помощью обычных методов ML, а моделировать многочисленные взаимодействия с пользователем с помощью динамических байесовских сетей.
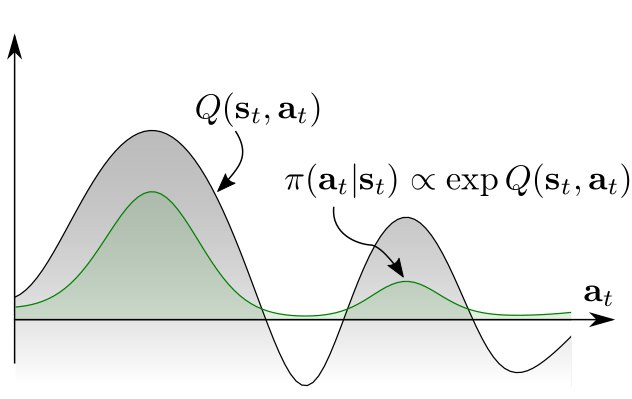
Затем @Liza расскажет про любопытное, нестандартное использование байесовских нейронных сетей для model-based обучения с подкреплением.
Если кто еще не успел заполнить ЗАЯВКУ НА ПРОПУСК, пожалуйста сделайте это до конца сегодняшнего дня.