А так, из школы известно тождество для скалярного произведения в координатах:
Ax*Bx + Ay*By + Az*Bz = |A| * |B| * cos(AvB)
Отсюда
cos(AvB) = (Ax*Bx + Ay*By + Az*Bz) / (|A| * |B|)
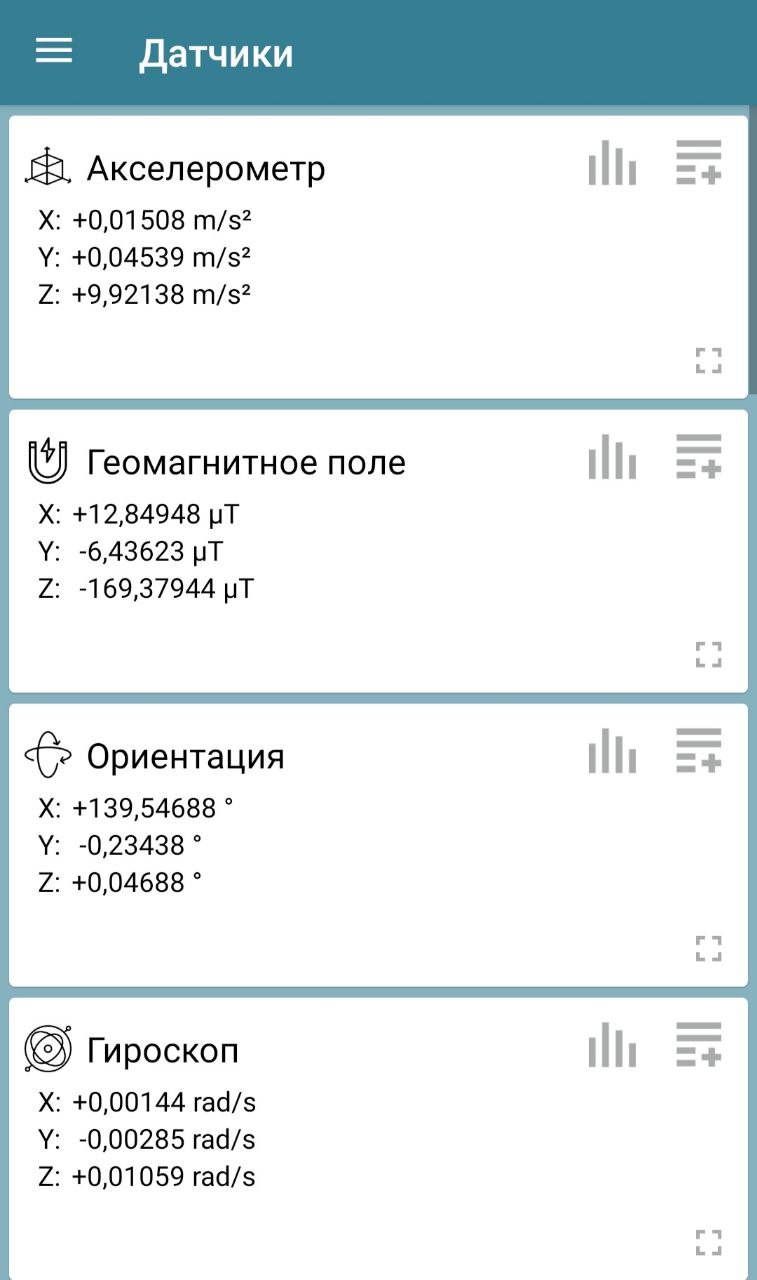
В нашем случае за вектор A можно принять g, |g| = 9.81, а за B - тот орт, угол относительно которого вас интересует.
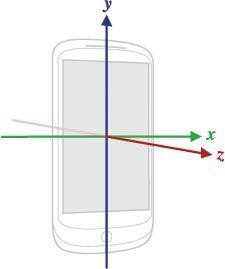
{X} = {1,0,0}
{Y} = {0,1,0}
{Z} = {0,0,1}