


KW
Size: a a a
2021 January 01
KW
Переслано от Konstantin Wilhelm
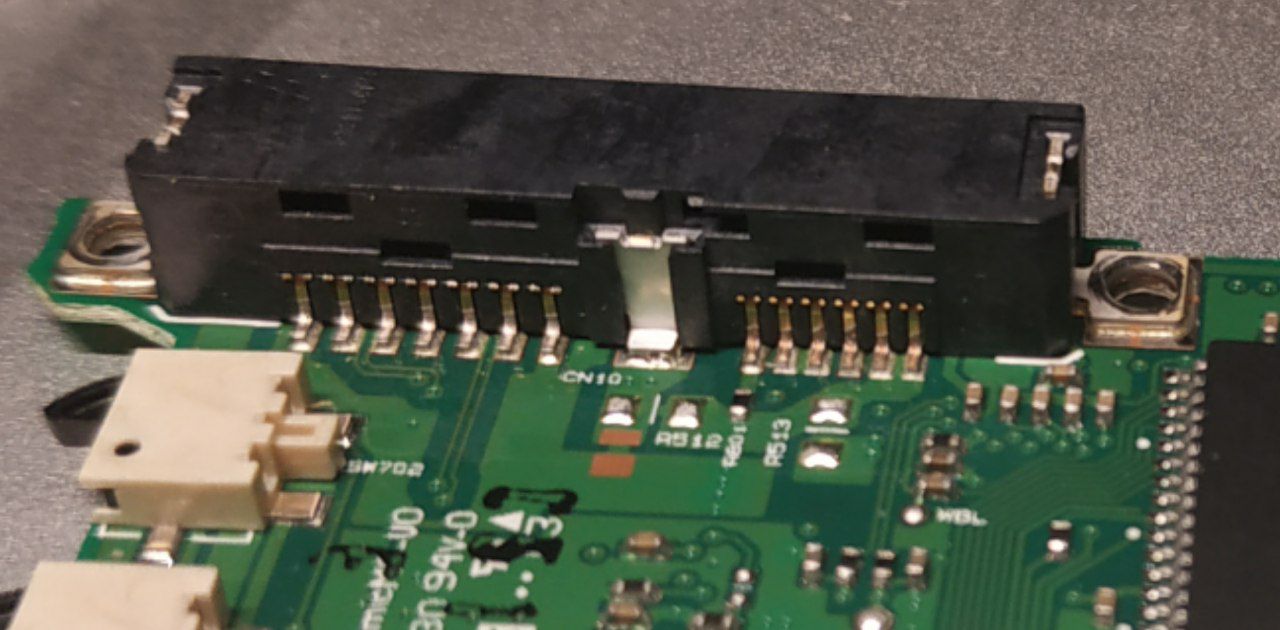
SATA разъём ноутбучного DVD. Хочу сделать из него адаптер на SATA винт. Реально ли припаятся кабелем на разъём или придется изготавливать PCB?
C
У меня из какого-то ноута валялся где-то переходник с саты обычного на сату дивидишный (там зачем-то было так сделано конструктивно)
он, вроде, просто напрямую заделан был
он, вроде, просто напрямую заделан был
KW
У меня из какого-то ноута валялся где-то переходник с саты обычного на сату дивидишный (там зачем-то было так сделано конструктивно)
он, вроде, просто напрямую заделан был
он, вроде, просто напрямую заделан был
Да там по идее просто механический адаптер
KW
Но тут сдувать разъём нужно с платы или контроллер
C
Да там по идее просто механический адаптер

C
Да там по идее просто механический адаптер

KW
Выглядит просто пассивным адаптером, но так и должно быть
SB
А Интел в Нижнем ещё есть?
Кстати, а Intel OpenVINO (фреймворк для работы с нейросетями) не в Нижнем Новгороде, случайно, пилят? Я такую байку слышал. Никто не в курсе?
P[
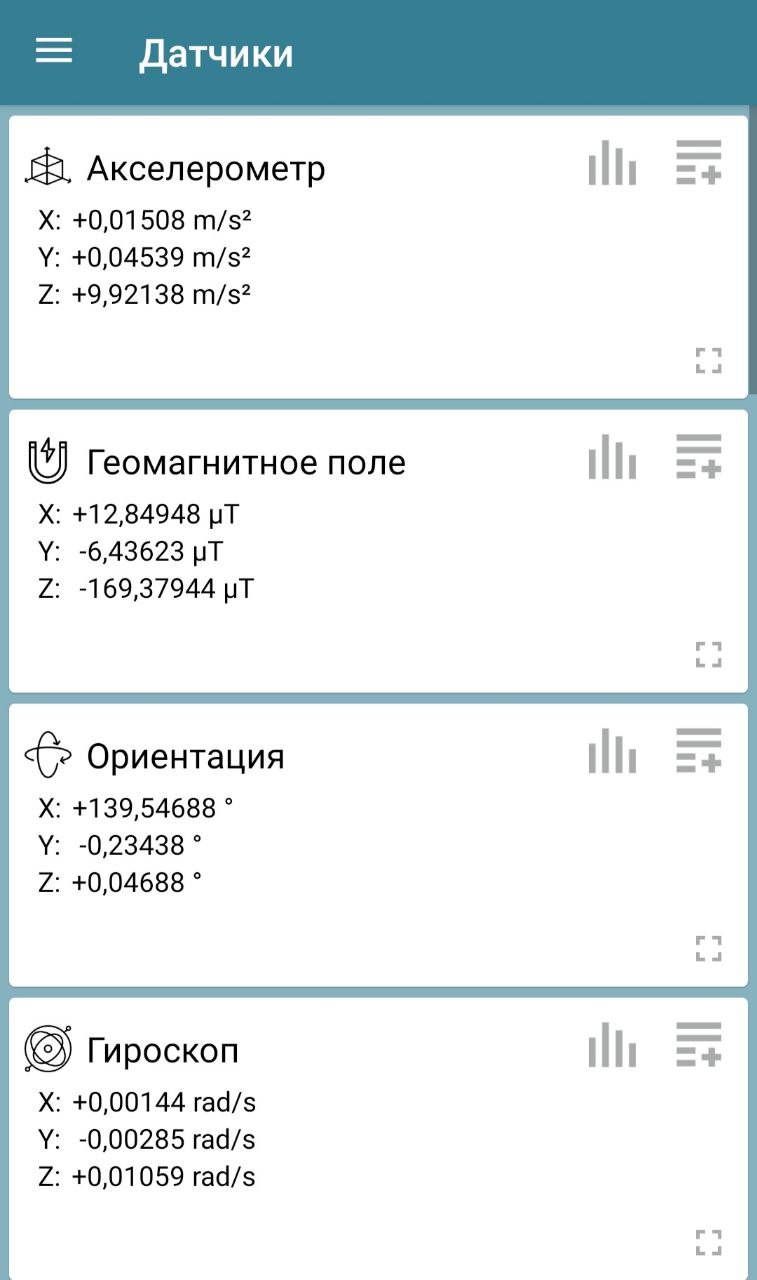
Привет ✋👋 кто шарит за сенсоры ,(датчики) в телефоне ведре? Пж отпишите в лс
I
Люблю я такие общие вопросы. И не понятно что нужно то ли объяснить что это. То ли прикрутить телефон к балистической ракете с привязкой к карте и поправками по GPS.
A
Кстати, а Intel OpenVINO (фреймворк для работы с нейросетями) не в Нижнем Новгороде, случайно, пилят? Я такую байку слышал. Никто не в курсе?
Не, не в курсе.
Я про сам факт существования филиала в Нижнем узнал не так давно.
Я про сам факт существования филиала в Нижнем узнал не так давно.
AS
Не, не в курсе.
Я про сам факт существования филиала в Нижнем узнал не так давно.
Я про сам факт существования филиала в Нижнем узнал не так давно.
Я вообще слышал, что в нижегородском интеле разработали или сильно приложили руку к OpenCV
P[
Люблю я такие общие вопросы. И не понятно что нужно то ли объяснить что это. То ли прикрутить телефон к балистической ракете с привязкой к карте и поправками по GPS.
Мне нужно понимать как они вычисляются и взаимодействуют друг с другом
AS
Я вообще слышал, что в нижегородском интеле разработали или сильно приложили руку к OpenCV
А, да, так и есть
ED
Мне нужно понимать как они вычисляются и взаимодействуют друг с другом
Никак не вычисляются и никак не взаимодействуют. Просто производится чтение показаний датчиков через API.
I
Никак не вычисляются и никак не взаимодействуют. Просто производится чтение показаний датчиков через API.
+1
P[
Никак не вычисляются и никак не взаимодействуют. Просто производится чтение показаний датчиков через API.
у нас есть ориентация, (азимут, наклон, разворот: X, Y, Z градусы или радианы), нам нужно из этой ориентации телефона (центра тяжести), сгенерировать данные акселерометра (X, Y, Z м/с^2) с учетом притяжения. Например, если телефон лежит на земле смотрит экраном вверх, тогда ориентация допустим (130, 0, 0), азимут нам не важен в данном случае, то данные с акселерометра (ускорение) будут (~0, ~0, -9.8) т.к. земля вниз тянет.
ED
Похоже, вы не совсем понимаете, как работает акселерометр. Типичный MEMS-акселерометр выдает проекции всех ускорений на оси, включая ускорение силы тяжести, вот и все.
ED
Если требуется знать точную ориентацию, игнорируя сторонние ускорения, скорее всего потребуется фильтрация и/или применение данных с датчика угловой скорости, который часто неправильно называют гироскопом.