


E
Size: a a a
2021 January 22
g
esp32-c3 начали рассылать?
А что за акция? Можно сэмпл попросить просто?
r
Раздавали платы
r
До нг
r
В честь выпуска нового чипа
g
Прикольно
AK
А что за акция? Можно сэмпл попросить просто?
ESP32-C3 Module for Russian Programmers
john lee <john.lee@espressif.com> 14 декабря 2020 г., 14:38
Hi Joe,
Thanks for writing to us!
The boards will ship sometime after Xmas. Guo Wei will keep you posted once available.
Take care and have a great day!
Можно просто попросить семпл вдруг прокатит
john lee <john.lee@espressif.com> 14 декабря 2020 г., 14:38
Hi Joe,
Thanks for writing to us!
The boards will ship sometime after Xmas. Guo Wei will keep you posted once available.
Take care and have a great day!
Можно просто попросить семпл вдруг прокатит
EG
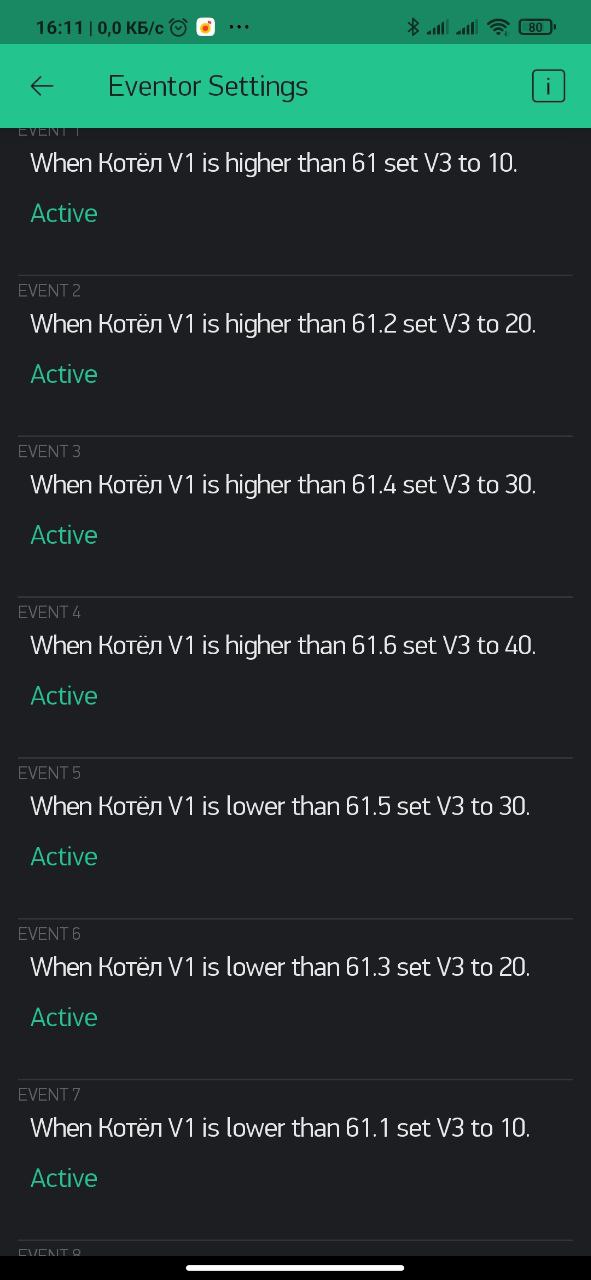
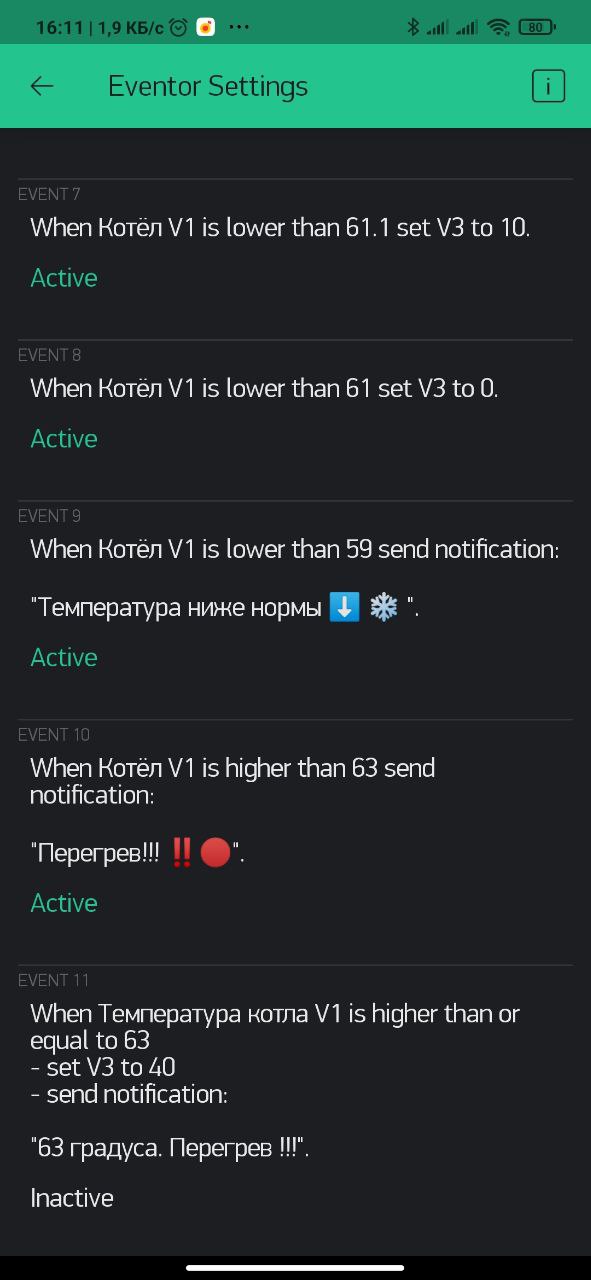
float temp_oven, s10, s20, s30, s40;
int temp_home;
float s10=(temp_home+0.2);
float s20=(temp_home+0.2);
float s30=(temp_home+0.4);
float s40=(temp_home+0.6);
/* Servo */
Servo servo;
BLYNK_WRITE(V3)
{
servo.write(param.asInt());
}
BLYNK_WRITE(V20)
{
int temp_home = param.asInt(); // назначение переменной входящего значения с пин V20 (виджет Vstep уст. темп. подачи)
if temp_oven > temp_home
servo.write(10);
if temp_oven > (s20)
servo.write(20);
if temp_oven > (s30)
servo.write(30);
if temp_oven > (s40)
servo.write(40);
if temp_oven < (s40-0.1)
servo.write(30);
if temp_oven < (s30-0.1)
servo.write(20);
if temp_oven < (s20-0.1)
servo.write(10);
if temp_oven < temp_home
servo.write(0);
void setup()
{
servo.write(0);
Serial.begin(115200);
Blynk.begin(auth, ssid, pass);
DS18B20.begin();
servo.attach(D2); // сервопривод на D4 ESP8266
timer.setInterval(1234L, getSendData);
}
void loop()
{
timer.run(); // Initiates SimpleTimer
Blynk.run();
}
/***************************************************
* Send Sensor data to Blynk
**************************************************/
void getSendData()
{
DS18B20.requestTemperatures();
temp_oven = DS18B20.getTempCByIndex(0);
Blynk.virtualWrite(1, temp_oven);
int temp_home;
float s10=(temp_home+0.2);
float s20=(temp_home+0.2);
float s30=(temp_home+0.4);
float s40=(temp_home+0.6);
/* Servo */
Servo servo;
BLYNK_WRITE(V3)
{
servo.write(param.asInt());
}
BLYNK_WRITE(V20)
{
int temp_home = param.asInt(); // назначение переменной входящего значения с пин V20 (виджет Vstep уст. темп. подачи)
if temp_oven > temp_home
servo.write(10);
if temp_oven > (s20)
servo.write(20);
if temp_oven > (s30)
servo.write(30);
if temp_oven > (s40)
servo.write(40);
if temp_oven < (s40-0.1)
servo.write(30);
if temp_oven < (s30-0.1)
servo.write(20);
if temp_oven < (s20-0.1)
servo.write(10);
if temp_oven < temp_home
servo.write(0);
void setup()
{
servo.write(0);
Serial.begin(115200);
Blynk.begin(auth, ssid, pass);
DS18B20.begin();
servo.attach(D2); // сервопривод на D4 ESP8266
timer.setInterval(1234L, getSendData);
}
void loop()
{
timer.run(); // Initiates SimpleTimer
Blynk.run();
}
/***************************************************
* Send Sensor data to Blynk
**************************************************/
void getSendData()
{
DS18B20.requestTemperatures();
temp_oven = DS18B20.getTempCByIndex(0);
Blynk.virtualWrite(1, temp_oven);
Для удобства код копируем сначала в pastebin потом ссылку сюда. Большие портянки кода тяжело тут читаются.
E
Для удобства код копируем сначала в pastebin потом ссылку сюда. Большие портянки кода тяжело тут читаются.
Понял. Учту. Спасибо.
Р
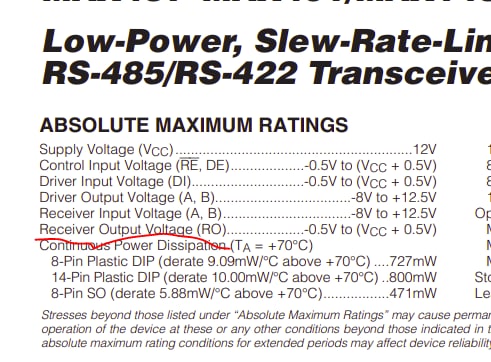
Ребят, подскажите, max485 и аналоги, при питании драйвера 5 вольтами на выходе данных RO какой уровень? либо там open drain и можно подтянуть к 3,3 в?
Р
чет в ДШ не пишут что там open drain
MV
подскажите по esp8266, нужно сохранять энергонезависимо часть настроек. попробовал использовать EEPROM.h но настройки сохраняются, но после загрузки уже данных нет.
Чтение делаю с помощью EEPROM.get, запись через EEPROM.put.
Не забываю конечно же делать EEPROM.begin и EEPROM.end
что не так?
пример записи значений:
bool saveConfig(config_t *cfg){
bool res=false;
putLogLn("saveConfig sizeof=" + String(sizeof(config_t), DEC));
cfg->save_config=1; // ставим флаг записи конфига
EEPROM.begin(sizeof(config_t));
delay(200);
EEPROM.put(EEPROM_startaddr, cfg);
delay(200);
res=EEPROM.commit(); // Only needed for ESP8266 to get data written
delay(200);
EEPROM.end(); // Free RAM copy of structure
delay(200);
putLogLn("saveConfig EEPROM.commit=" + String(res, DEC));
return res;
}
Чтение делаю с помощью EEPROM.get, запись через EEPROM.put.
Не забываю конечно же делать EEPROM.begin и EEPROM.end
что не так?
пример записи значений:
bool saveConfig(config_t *cfg){
bool res=false;
putLogLn("saveConfig sizeof=" + String(sizeof(config_t), DEC));
cfg->save_config=1; // ставим флаг записи конфига
EEPROM.begin(sizeof(config_t));
delay(200);
EEPROM.put(EEPROM_startaddr, cfg);
delay(200);
res=EEPROM.commit(); // Only needed for ESP8266 to get data written
delay(200);
EEPROM.end(); // Free RAM copy of structure
delay(200);
putLogLn("saveConfig EEPROM.commit=" + String(res, DEC));
return res;
}
MV
uint8_t loadConfig(config_t *cfg){
putLogLn("loadConfig sizeof=" + String(sizeof(config_t), DEC));
EEPROM.begin(sizeof(config_t));
EEPROM.get(EEPROM_startaddr, cfg);
EEPROM.end();
if (!cfg->save_config){
putLogLn("loadConfig get defaul value!");
} else{
putLogLn("loadConfig load value from eeprom");
}
return 1;
}
putLogLn("loadConfig sizeof=" + String(sizeof(config_t), DEC));
EEPROM.begin(sizeof(config_t));
EEPROM.get(EEPROM_startaddr, cfg);
EEPROM.end();
if (!cfg->save_config){
putLogLn("loadConfig get defaul value!");
} else{
putLogLn("loadConfig load value from eeprom");
}
return 1;
}
S
float temp_oven, s10, s20, s30, s40;
int temp_home;
float s10=(temp_home+0.2);
float s20=(temp_home+0.2);
float s30=(temp_home+0.4);
float s40=(temp_home+0.6);
/* Servo */
Servo servo;
BLYNK_WRITE(V3)
{
servo.write(param.asInt());
}
BLYNK_WRITE(V20)
{
int temp_home = param.asInt(); // назначение переменной входящего значения с пин V20 (виджет Vstep уст. темп. подачи)
if temp_oven > temp_home
servo.write(10);
if temp_oven > (s20)
servo.write(20);
if temp_oven > (s30)
servo.write(30);
if temp_oven > (s40)
servo.write(40);
if temp_oven < (s40-0.1)
servo.write(30);
if temp_oven < (s30-0.1)
servo.write(20);
if temp_oven < (s20-0.1)
servo.write(10);
if temp_oven < temp_home
servo.write(0);
void setup()
{
servo.write(0);
Serial.begin(115200);
Blynk.begin(auth, ssid, pass);
DS18B20.begin();
servo.attach(D2); // сервопривод на D4 ESP8266
timer.setInterval(1234L, getSendData);
}
void loop()
{
timer.run(); // Initiates SimpleTimer
Blynk.run();
}
/***************************************************
* Send Sensor data to Blynk
**************************************************/
void getSendData()
{
DS18B20.requestTemperatures();
temp_oven = DS18B20.getTempCByIndex(0);
Blynk.virtualWrite(1, temp_oven);
int temp_home;
float s10=(temp_home+0.2);
float s20=(temp_home+0.2);
float s30=(temp_home+0.4);
float s40=(temp_home+0.6);
/* Servo */
Servo servo;
BLYNK_WRITE(V3)
{
servo.write(param.asInt());
}
BLYNK_WRITE(V20)
{
int temp_home = param.asInt(); // назначение переменной входящего значения с пин V20 (виджет Vstep уст. темп. подачи)
if temp_oven > temp_home
servo.write(10);
if temp_oven > (s20)
servo.write(20);
if temp_oven > (s30)
servo.write(30);
if temp_oven > (s40)
servo.write(40);
if temp_oven < (s40-0.1)
servo.write(30);
if temp_oven < (s30-0.1)
servo.write(20);
if temp_oven < (s20-0.1)
servo.write(10);
if temp_oven < temp_home
servo.write(0);
void setup()
{
servo.write(0);
Serial.begin(115200);
Blynk.begin(auth, ssid, pass);
DS18B20.begin();
servo.attach(D2); // сервопривод на D4 ESP8266
timer.setInterval(1234L, getSendData);
}
void loop()
{
timer.run(); // Initiates SimpleTimer
Blynk.run();
}
/***************************************************
* Send Sensor data to Blynk
**************************************************/
void getSendData()
{
DS18B20.requestTemperatures();
temp_oven = DS18B20.getTempCByIndex(0);
Blynk.virtualWrite(1, temp_oven);

SZ
Mike Vinogradov
подскажите по esp8266, нужно сохранять энергонезависимо часть настроек. попробовал использовать EEPROM.h но настройки сохраняются, но после загрузки уже данных нет.
Чтение делаю с помощью EEPROM.get, запись через EEPROM.put.
Не забываю конечно же делать EEPROM.begin и EEPROM.end
что не так?
пример записи значений:
bool saveConfig(config_t *cfg){
bool res=false;
putLogLn("saveConfig sizeof=" + String(sizeof(config_t), DEC));
cfg->save_config=1; // ставим флаг записи конфига
EEPROM.begin(sizeof(config_t));
delay(200);
EEPROM.put(EEPROM_startaddr, cfg);
delay(200);
res=EEPROM.commit(); // Only needed for ESP8266 to get data written
delay(200);
EEPROM.end(); // Free RAM copy of structure
delay(200);
putLogLn("saveConfig EEPROM.commit=" + String(res, DEC));
return res;
}
Чтение делаю с помощью EEPROM.get, запись через EEPROM.put.
Не забываю конечно же делать EEPROM.begin и EEPROM.end
что не так?
пример записи значений:
bool saveConfig(config_t *cfg){
bool res=false;
putLogLn("saveConfig sizeof=" + String(sizeof(config_t), DEC));
cfg->save_config=1; // ставим флаг записи конфига
EEPROM.begin(sizeof(config_t));
delay(200);
EEPROM.put(EEPROM_startaddr, cfg);
delay(200);
res=EEPROM.commit(); // Only needed for ESP8266 to get data written
delay(200);
EEPROM.end(); // Free RAM copy of structure
delay(200);
putLogLn("saveConfig EEPROM.commit=" + String(res, DEC));
return res;
}
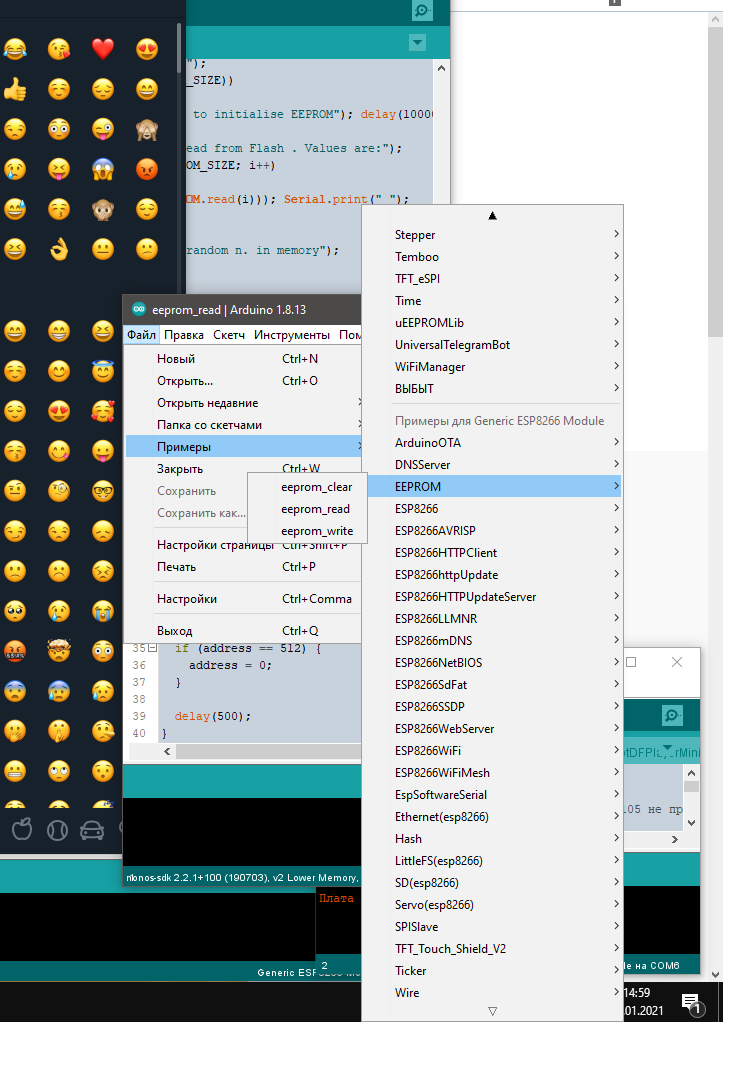
я бегло посмотрел твой код и примеры в ардуино, они разные, начни с этого
MV
я бегло посмотрел твой код и примеры в ардуино, они разные, начни с этого
примеры где смотрели, чтобы на них переделать?
SZ
AK
Роман. Отдел разработки
Ребят, подскажите, max485 и аналоги, при питании драйвера 5 вольтами на выходе данных RO какой уровень? либо там open drain и можно подтянуть к 3,3 в?
MV
у дуни есть отличия от esp