


D
Size: a a a
2021 January 04
G
Есть пару вопросов, но исходя из начала видео уточню, задавать можно или лучше не надо?
Задавайте. То просто я его снимал немного на эмоциях. Достали диванные философы, которые мне рассказывали на тот момент, что оно работать не может, когда оно печатает уже давно
H
Gogi
Твое изобретение?
G
Твое изобретение?
Да
H
Gogi
Да
Щас посмотрю видео)
VN
Gogi
Задавайте. То просто я его снимал немного на эмоциях. Достали диванные философы, которые мне рассказывали на тот момент, что оно работать не может, когда оно печатает уже давно
Тогда в общем, по Y. В чем плюс той системы перед этой. Было сказано что есть желание отказаться от кольцевого ремня, здесь он тоже разомкнут и крепится на каретке, при этом имеет длину раза в 2 меньше, что положительно скажется на его упругой деформации при нормальных ускорениях и рывках
E
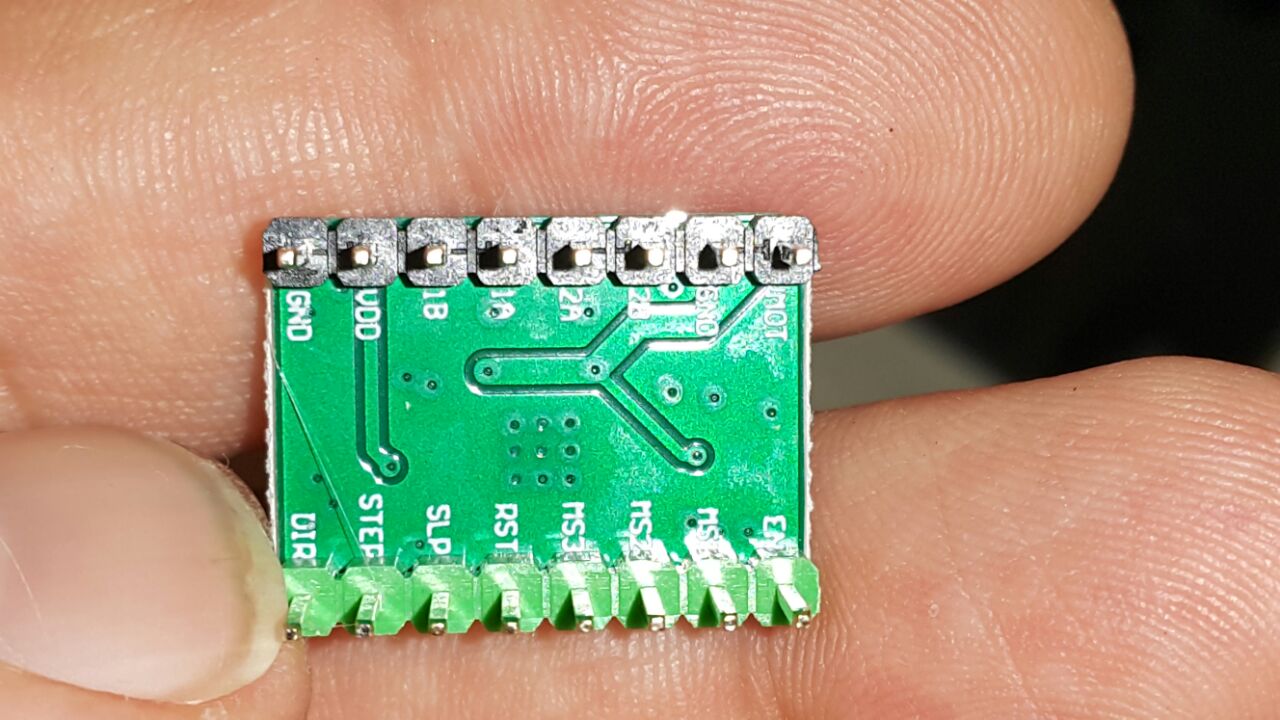
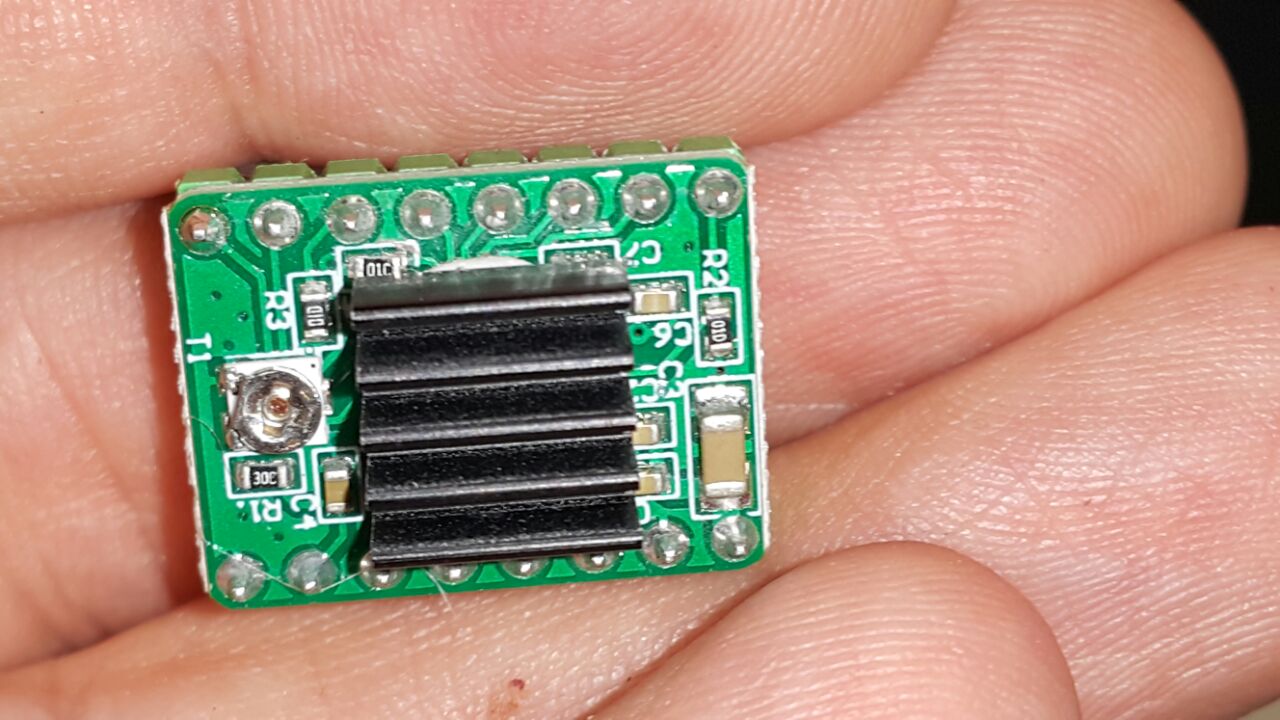
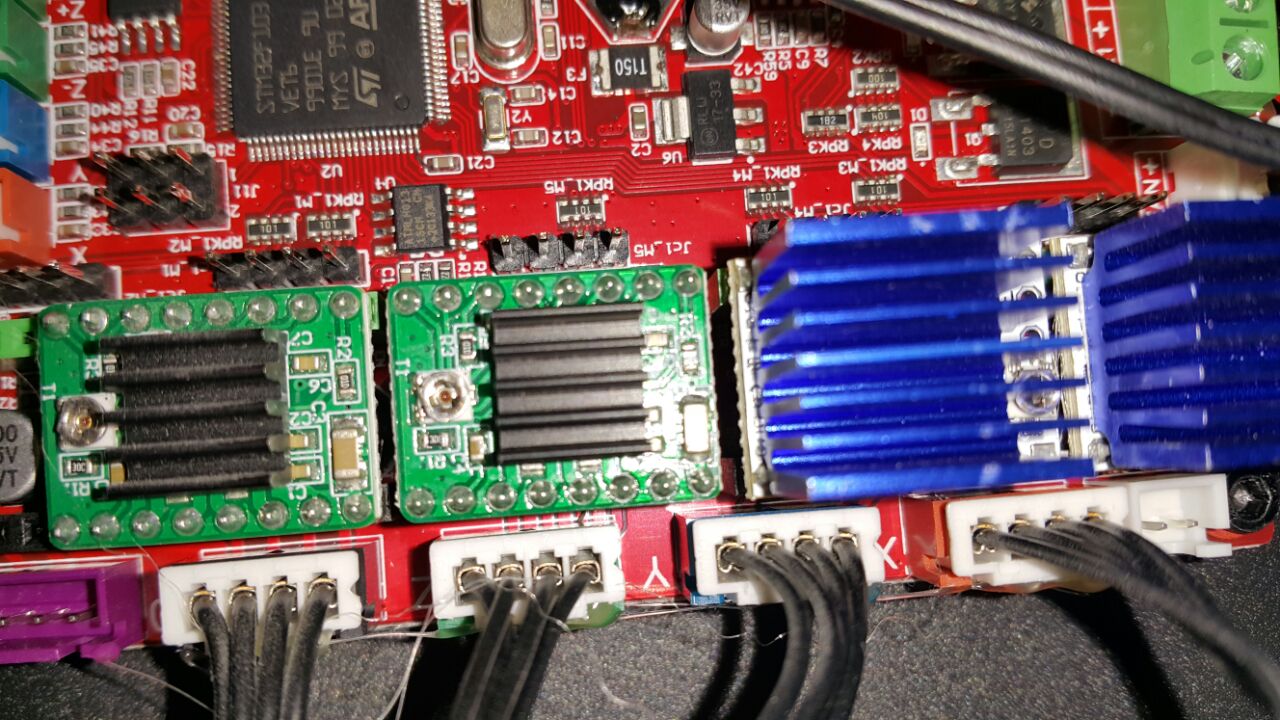
Доброго времени суток! Подскажите по драйверам. Какой модели те что с зеленой маской текстолита? Принтер Медведь 5. Заказывался 25 дек 2020 со склада в России. Проблема - пищит экструдер на ретракте. На большой скорости при замене пластика. Вроде как с ноября обещали с тихими. Подозреваю что 4988.
E
E
VN
(не художник)
AA
Evgeny
Доброго времени суток! Подскажите по драйверам. Какой модели те что с зеленой маской текстолита? Принтер Медведь 5. Заказывался 25 дек 2020 со склада в России. Проблема - пищит экструдер на ретракте. На большой скорости при замене пластика. Вроде как с ноября обещали с тихими. Подозреваю что 4988.
Сними радиатор и прочитай
DS
Evgeny
Доброго времени суток! Подскажите по драйверам. Какой модели те что с зеленой маской текстолита? Принтер Медведь 5. Заказывался 25 дек 2020 со склада в России. Проблема - пищит экструдер на ретракте. На большой скорости при замене пластика. Вроде как с ноября обещали с тихими. Подозреваю что 4988.
А4988
DS
Не обещали с тихими, а 1 партию так сделали по своим внутренним причинам
E
Спасибо. Закажу пару 2209 ;)
VN
Gogi
Задавайте. То просто я его снимал немного на эмоциях. Достали диванные философы, которые мне рассказывали на тот момент, что оно работать не может, когда оно печатает уже давно
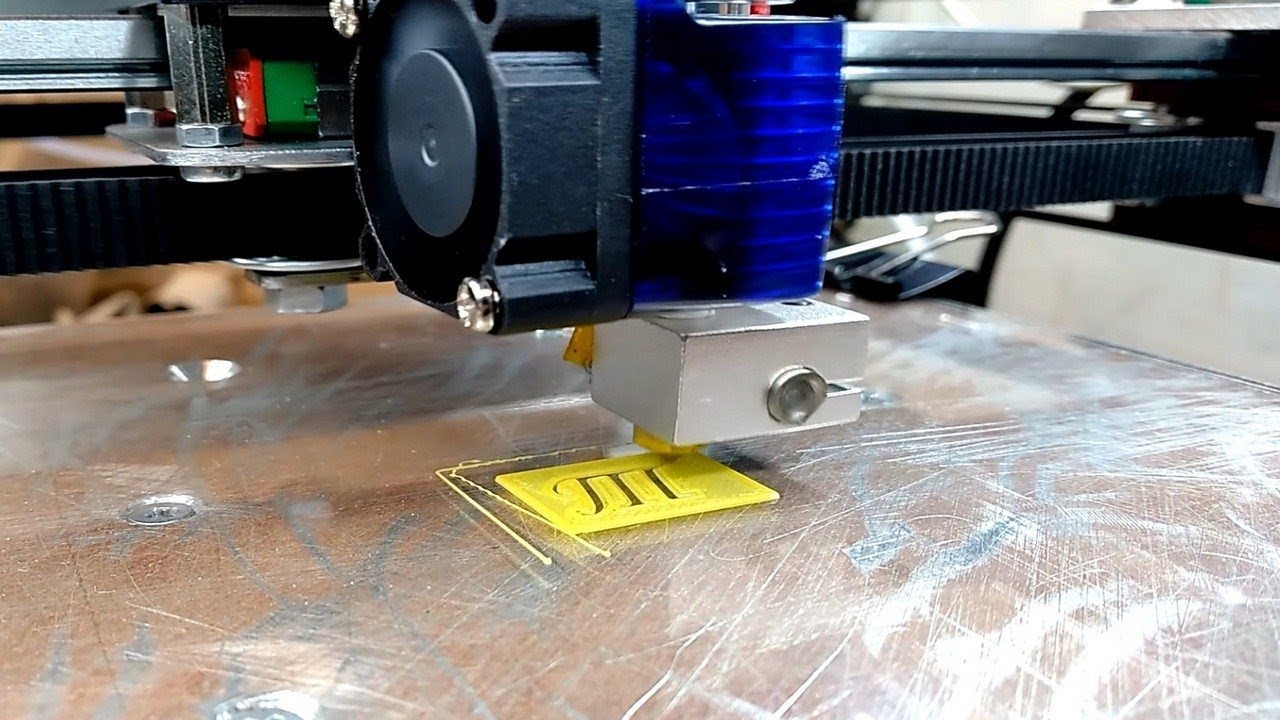
И на по X. Из мелочи - малая площадь контакта на движке, но при должном натяжении четверти оборота хватает.
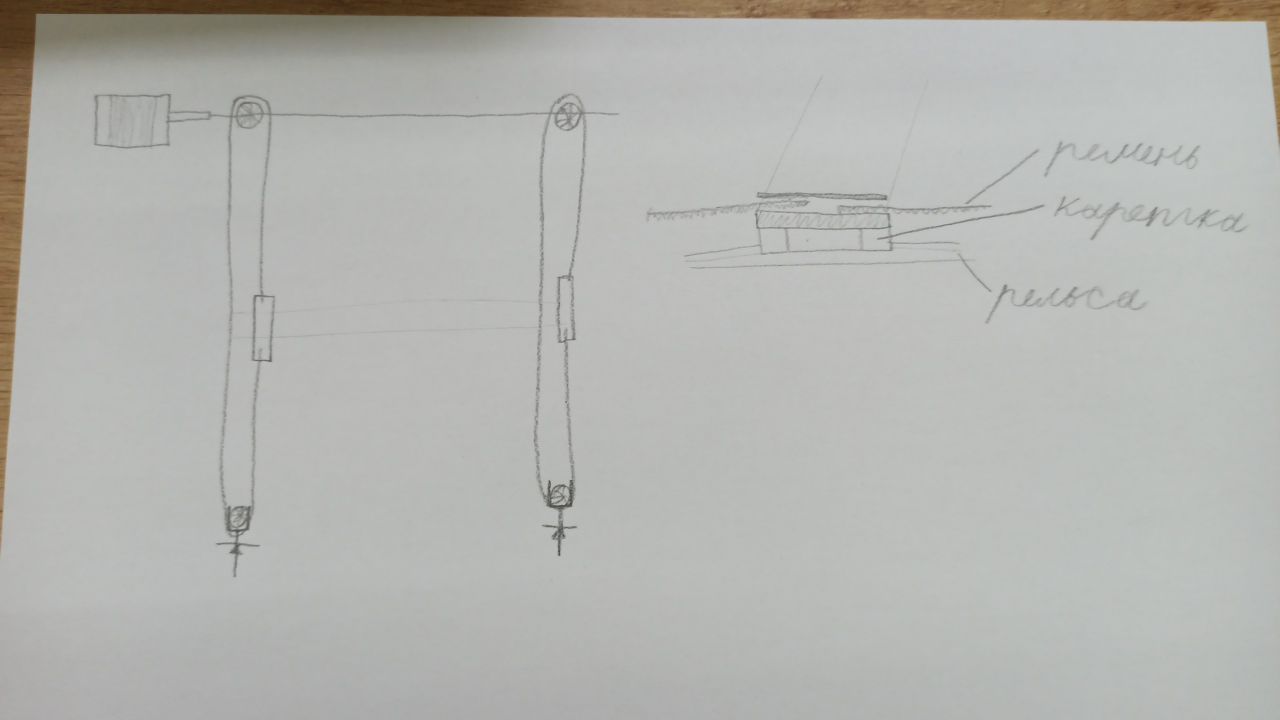
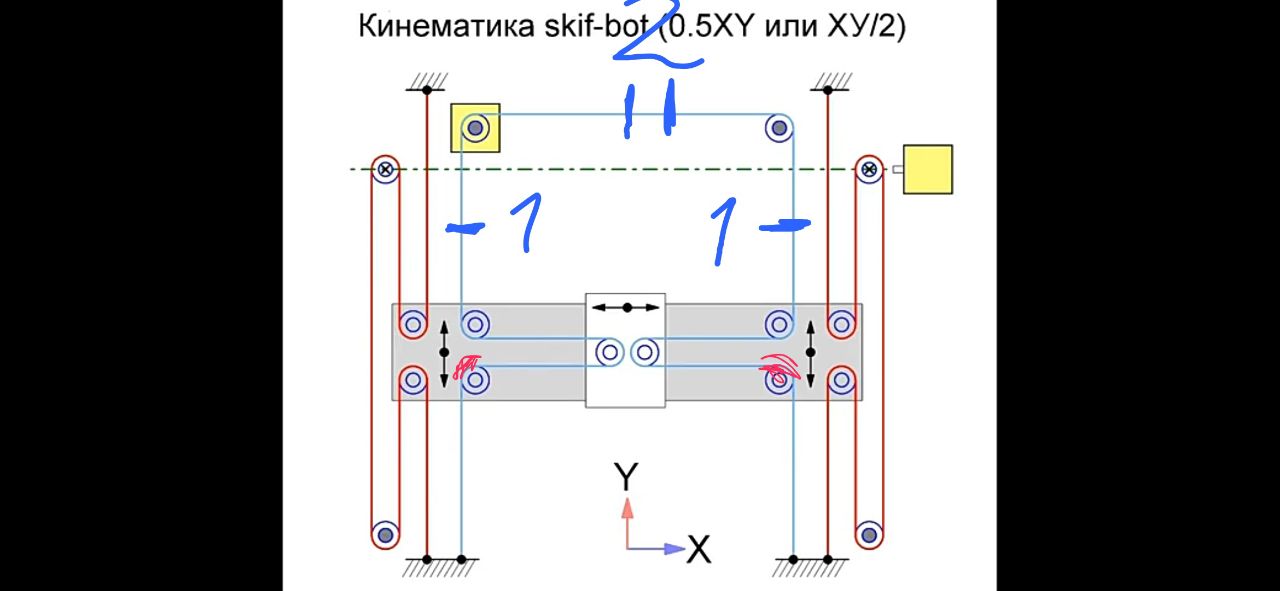
На тему фиксации каретки по X при перемещении по Y - с одной стороны ремень более длинный, причем при приближении экструдера к мотору отрезки под номером 1 уменьшаются, а отрезок 2 остаётся фиксированным, что при приближении экструдера к мотору может дать сдвиг экструдера в лево.
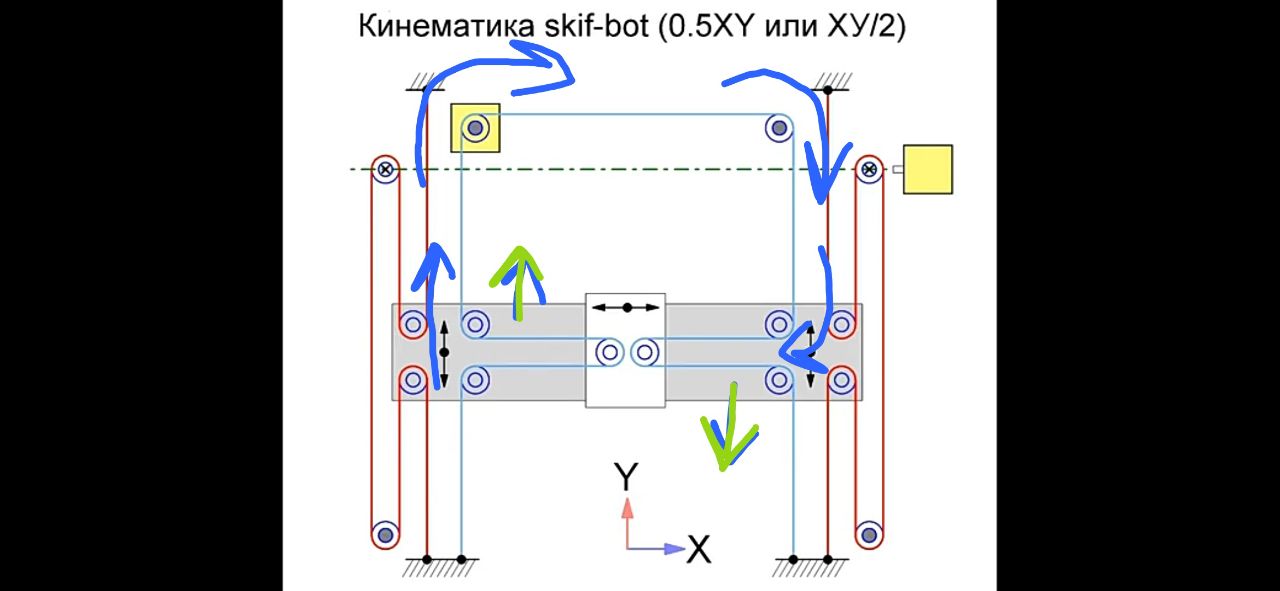
И разнонаправленные нагрузки - в первой серии было сказано что эта версия кинематики их почти убирает, и вопрос скорее к слову почти. Я нарисовал нагрузки при движении вверх, мы видели аналогичную картину как для H bot, можно было бы сказать что благодаря блоку эта сила делится на 2, только гнется ось X, и гнется она от ускорения и рывка, которые зависят от скорости печати в целом, а блок, в данном случае просто сделает в 2 раза больше шагов, но приложит ту же нагрузку к разным концам, и получаем перекос аналогичный Hbot. Правды говоря этот перекос компенсируют женские крепления, знаю, поскольку владелец хорошегоHbot принтера)
На тему фиксации каретки по X при перемещении по Y - с одной стороны ремень более длинный, причем при приближении экструдера к мотору отрезки под номером 1 уменьшаются, а отрезок 2 остаётся фиксированным, что при приближении экструдера к мотору может дать сдвиг экструдера в лево.
И разнонаправленные нагрузки - в первой серии было сказано что эта версия кинематики их почти убирает, и вопрос скорее к слову почти. Я нарисовал нагрузки при движении вверх, мы видели аналогичную картину как для H bot, можно было бы сказать что благодаря блоку эта сила делится на 2, только гнется ось X, и гнется она от ускорения и рывка, которые зависят от скорости печати в целом, а блок, в данном случае просто сделает в 2 раза больше шагов, но приложит ту же нагрузку к разным концам, и получаем перекос аналогичный Hbot. Правды говоря этот перекос компенсируют женские крепления, знаю, поскольку владелец хорошегоHbot принтера)
VN
Gogi
Задавайте. То просто я его снимал немного на эмоциях. Достали диванные философы, которые мне рассказывали на тот момент, что оно работать не может, когда оно печатает уже давно
VN
Gogi
Задавайте. То просто я его снимал немного на эмоциях. Достали диванные философы, которые мне рассказывали на тот момент, что оно работать не может, когда оно печатает уже давно
И да, при качественной сборке это все справедливо, только если пытаться выжать сверх топовые показатели соотношения скорость/качество, понятно что оно будет работатьи будет работать хорошо, но раз говорим про новую систему, чтоб она прижилась ей нужны какие-то явные неоспоримые плюсы, воть)
G
Тогда в общем, по Y. В чем плюс той системы перед этой. Было сказано что есть желание отказаться от кольцевого ремня, здесь он тоже разомкнут и крепится на каретке, при этом имеет длину раза в 2 меньше, что положительно скажется на его упругой деформации при нормальных ускорениях и рывках
Да вроде ж рассказал. Преимущество в удвоении усилия. Ремни да, нагружаются больше, но уже почти год и проблем с ними нет